Theory
Intro
Tutorial
Lab 1: Introduction
+
Arduino 101
Connection
Mechanical
+
Elcano BOM
System
Lab 2: Drive by wire
+
Electronic
Lab 3: Cyclometer
Lab 4: Drive
Lab 5: Obstacle Avoidance
Lab 6: INU
Lab 7: GPS
Lab 8: Kalman Filter
+
Land Navigation
Navigation System
Lab 9: Mapping & Path Planning
Lab 10: Pilot
Lab 11: Cone Vision
+
Cone Detector
Lab 12: Lane Vision
Simulator
Wiki
Pictures
Videos
Links
Pictures
The Elcano Project is featured in one of the three display cases at University of Washington Bothell. It will be on display until the end of the year
Vehicles #1 and #2 under development
UW Bothell student team, Fall 2015
Some of the crew at UW Bothell
Front row: Jeremy Bobotek, Dylan Katz, Aaron Conrad. Back row: Shyawn Karim, Tyler Folsom, Chase Skelton, Pengfei (Peter) Zhu, Varsha Srivastava
Budi demonstrating drive-by-wire
Vehicle #2 being operated remotely
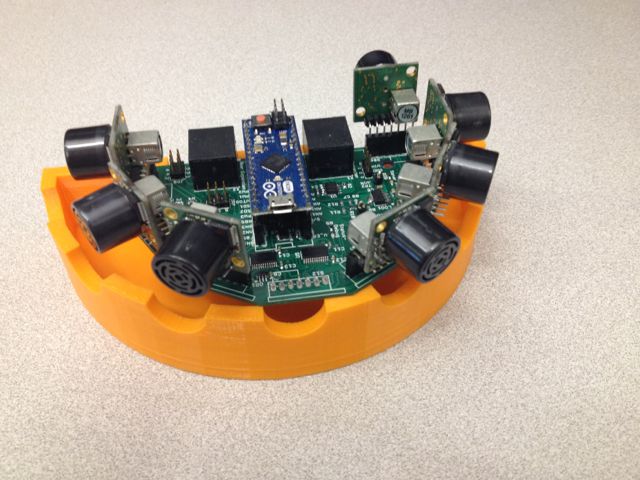
Sonar array showing custom printed circuit board and first try at a 3D printed case
Seattle Mini Maker Faire
Chase Skelton, Tyler Folsom and Jeremy Bobotek
Vehicle #2
Vehicle #2 demonstration at UW Bothell Convocation, September 2015
Embedded Systems class at University of Washington Bothell.
Tyler Folsom